Duration: (24:2) ?Subscribe5835 2025-02-09T04:57:37+00:00
ONLINE Lockheed Martin Robotics Seminar, April 16, 2021: Katia Sycara
(1:1:39)
Katia Sycara / Intelligent Disobedience in Human Agent Interactions
(1:10:55)
Katia Sycara | Wikipedia audio article
(8:4)
Katia Sycara- Human Supervisory Control of Robotic Swarms
(24:2)
Katia Sycara - \
“Robust Human Interaction with Robotic Swarms” Prof. Katia Sycara (ICAART 2016)
(3:1econd)
\
(1:18:8)
ROSE hand: design, fabrication, and evaluation (for RSS 2023 paper)
(3:17)
US Testing the World’s Largest $200 Million Drone: Meet the RQ-4 UAV
(10:34)
Diffusion Policy Controlling Robots - Part 1
(1:26:34)
Service Academies Swarm Challenge: Game Play and Challenges
(6:38)
Crazyswarm: a large nano-quadcopter swarm (Sep. 2016)
(1:50)
Keynote Talk by C. Stachniss: Robots in the Field - Towards Sustainable Crop Production (ICRA'20)
(20:9)
CPAR Changliu Liu 3-12-18
(42:41)
Aruco Markers Detection Python OpenCV | Easiest Method | Computer Vision
(16:25)
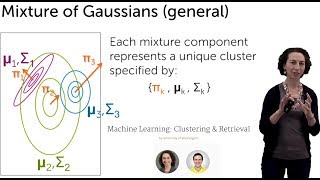
Gaussian Mixture Models for Clustering
(12:13)
[RSS 2023] Reconfigurable Robot Control Using Flexible Coupling Mechanisms
(4:58)
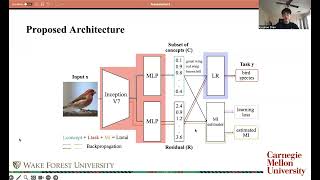
Limitation in Concept Bottleneck Models - Residuals and Vector Disentanglement | Konghao Zhao
(9:10)
Carnegie Mellon Robotics Institute Summer Scholars (RISS) Join us!
(3:21:35)
The Effect of Culture on Trust in Automation: Reliability and Workload
(22:13)
Offline Reinforcement Learning for Informative Path Planning | Srikar Babu Gadipudi
(8:18)
[ICRA2022] Configuration Control for Physical Coupling of Heterogeneous Robot Swarms
(4:1econd)
[IFAC 2020] Why Does Symmetry Cause Deadlocks?
(15:26)
[ICRA 2021] PuzzleBots: Physical Coupling of Robot Swarms
(13:6)
Adaptive Sampling and Online Learning in Multi-Robot Sensor Coverage with Mixture of Gaussian Proces
(2:52)
SwarmCloak: Landing of a Swarm of Nano-Quadrotors on Human Arms
(3:)
(ICRA 2018) Swarm Information Invariants Paper Outline
(3:18)
CoRL 2020, Spotlight Talk 25: Augmenting GAIL with BC for sample efficient imitation learning
(5:33)
Using Information Invariants to Compare Swarm Algorithms and General Multi-Robot Algorithms




















![[RSS 2023] Reconfigurable Robot Control Using Flexible Coupling Mechanisms](https://ytimg.googleusercontent.com/vi/R3gFplorCJg/mqdefault.jpg)



![[ICRA2022] Configuration Control for Physical Coupling of Heterogeneous Robot Swarms](https://ytimg.googleusercontent.com/vi/vOY5iG4dra8/mqdefault.jpg)
![[IFAC 2020] Why Does Symmetry Cause Deadlocks?](https://ytimg.googleusercontent.com/vi/dQ00RrQ1cRg/mqdefault.jpg)
![[ICRA 2021] PuzzleBots: Physical Coupling of Robot Swarms](https://ytimg.googleusercontent.com/vi/QP3eMZXLSw4/mqdefault.jpg)




