Duration: (2:35) ?Subscribe5835 2025-02-23T23:44:41+00:00
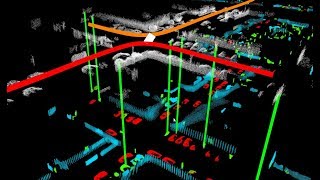
SegMap: 3D Segment Mapping using Data-Driven Descriptors
(2:35)
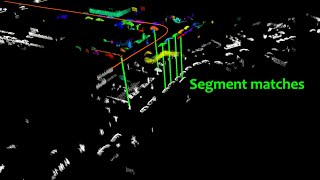
SegMatch: Segment based loop-closure for 3D point clouds
(2:13)
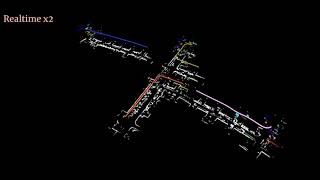
Segmap Multi Demo
(1:59)
segmap test
(16)
SegMap test on KAIST03, MulRan dataset
(2:29)
SegMap test in KAIST
(19:20)
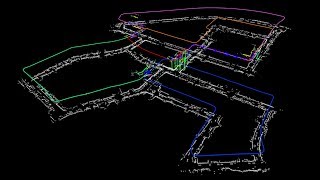
Incremental Segment-Based Localization in 3D Point Clouds
(2:)
3D Semantic Mapping
(26)
From SLAM to Cloud: Next-Gen 3D Reality Capture
(1:1:32)
An Online Multi-Robot SLAM System for 3D LiDARs
(1:52)