Duration: (10:20) ?Subscribe5835 2025-02-27T00:26:59+00:00
Troubleshooting ROS Networking Issues
(10:20)
Deep Dark ROS E6: Top 5 ROS2 Basic issues and how to solve them
(15:6)
ROS vs. Scalability: Can We Fix the DDS Problem or Is It Time to Move On?
(10:47)
ROS Debugging Work Space: catkin_make common issues
(7:18)
ROS Hack #3 - Issue : Gazebo plugins not working
(1:13)
Installing ROS, problem unable to use rosdep
(2:45)
A demo of agriculture robot. Robotic arm + Raspberry PI + Python + OpenCV.
(44)
Install ROS Noetic + Gazebo 10 on Ubuntu 20.04
(17:50)
ROS Developers LIVE-Class #15: Using ROS TF to transform sensor data
(1:6:41)
1 How Gazebo Plugin Works? | Gazebo Plugin Tutorials
(8:30)
Deep Dark ROS E2: Making Grippers work Finally!
(20:7)
TF ROS - Full Course for Beginners
(1:27:36)
How I Program Robots: My Languages
(5:6)
RPLidar and Hector SLAM for Beginners | ROS Tutorial #8
(9:41)
What is ROS? Why it's Important for making Robots!
(5:1econd)
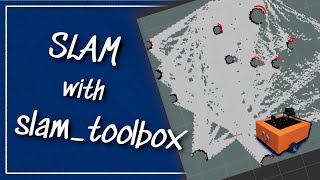
Easy SLAM with ROS using slam_toolbox
(25:47)
[ROS Q\u0026A] 101 - TF Tutorial - Problem to display second turtle
(7:10)
Low-Cost Hardware Routing on MikroTik Switches - Bridge Mode - Episode 2 Featuring MikroTik Marc
(58:45)
Debug ROS Errors Faster with ChatGPT | ROS2 Developers Open Class #173
(1:10:54)
ROS를 이용한 Velodyne VLP-16 MANUAL
(5:)
ros, interactive markers problem
(1:16)
ROS1 - roscore command not found - How to Fix
(3:34)
Ros Always Comes Home For Food 🤣
(23)
[ROS Q\u0026A] 064 - Catkin workspaces - Problem copying files from one to another
(6:46)
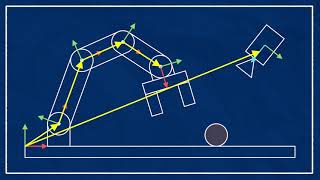
The ROS Transform System (TF) | Getting Ready to Build Robots with ROS #6
(15:13)




















![[ROS Q\u0026A] 101 - TF Tutorial - Problem to display second turtle](https://ytimg.googleusercontent.com/vi/WkE5T7qkuFg/mqdefault.jpg)





![[ROS Q\u0026A] 064 - Catkin workspaces - Problem copying files from one to another](https://ytimg.googleusercontent.com/vi/Lg_oM4vFIEs/mqdefault.jpg)